
説明:[保温カップ溶接継ぎ目の位置決めシステム]は、保温カップ製造工程での溶接継ぎ目の位置決めと指定角度の回転に適します。手動による位置決めに取って代わり、工程要件に応じて指定角度に回転でき、次の工程のスムーズな実行を保証できます。手動の精密な位置決めと回転に完全に取って代わることができ、ロボットを使用して材料を送るか排出し、生産効率を大幅に向上させ、生産サイクルを短縮して、生産自動化を実現し、不良率を減らし、コストを節約できます。
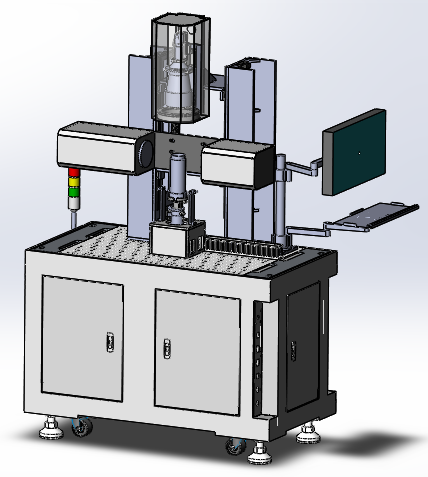
データパラメータ等:高精度非接触の位置決め(精度±1.5°)、位置決めの精度99%、システム構造がシンプルで、メンテナンスが簡単です。
説明:[石炭废石分離システム]废石排出のためのスマート乾式分離技術の原理は、識別システムによって材料が識別された後、材料の特性を反映できる特性情報がコレクターと制御システムで生成されることです。制御システムは、情報に応じて選別要件を実行システムに送信し、実行システムは、指示に従って選別作業を完了します。 独立したSmart vision技術に基づいて開発されたこのシステムは、赤外線短波ラインアレイ画像、X線スキャン画像、3D画像および可視光画像を使用して、マルチモーダルフュージョンと正確な画像レジストレーションを行い、石炭、中程度の石炭、石炭废石、不純物を判断し、仕分け装置を使用して废石を取り除きます。
データパラメータ等:50mm〜300mm検出でき、検出効率>97%、他の単一X線検出製品の指標よりも高い。